| 上一篇 | 目录 | 下一篇 |
Mission Planner 初始设置
由Mission Planner顶部菜单的“初始设置”进入,有几个子菜单。本文是为飞控做初始化配置,这部分是必须做的。
每个菜单项都将显示一个新界面,下面将对每个菜单项进行讨论,并提供更多详细信息的链接。
安装固件
如果未连接到飞控,你将看到此菜单项。如果你有一个新的飞控或如果你想更新控制软件,你必须上传固件到飞控。
固件地址为firmware.ardupilot.org。如果飞控已经安装了ArduPilot固件,您可以使用此页面上传不同类型或版本的固件。请参阅此加载固件页面。否则,第一次安装ArduPilot必须使用Mission Planner以外的其他方法,请参见本节。
在这个界面上,你还可以点击“All Optionbootloader”选择和加载任何类型的固件,或“装载自定义固件(Load custom firmware)”,通常是开放人员装载自己测试用的固件。
安装旧版本固件
还有另一种加载旧版本固件的方法。同样,仅在未连接飞控时候才显示。
必要硬件
如果飞控已连接,你将看到此菜单项。点击此菜单项可查看在尝试操作飞行器之前必须设置的项目。具体操作请查看帮助文档,其中覆盖了特定飞行器(直升机,飞机,多旋翼)。
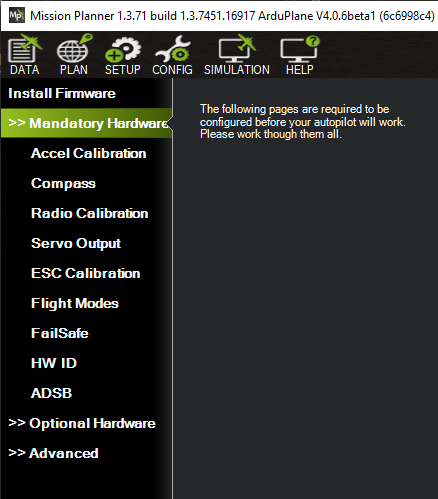
在操作飞行器之前,您必须设置:
加速度校准
指南针(飞机可选)
遥控器校准
舵机输出(Servo Output):配置各种输出功能。初始安装固件时候会加载默认值,但需要再次检查此参数是否配置正确。
ESC校准(ESC Calibration)
飞行模式:请参阅飞机、直升机或多旋翼飞行模式页面。
故障保护:请参阅飞机、直升机或多旋翼的故障保护页面。
可选硬件
此子菜单允许配置可选设备,其中许多可以在Mission Planner未连接飞控时配置,包括Sik电台(数传)、UAVCAN、PX4Flow光流、天线云台(Antenna Tracker),以及设置一个操纵杆(joystick)在任务计划中使用。
连接飞控后,可以配置电池监视器、OSD、空速和声纳等外设。此外,此子菜单有一个电机测试功能,允许你测试直升机和多旋翼电机旋转方向和顺序。
高级设置
这部分用于高级用户。
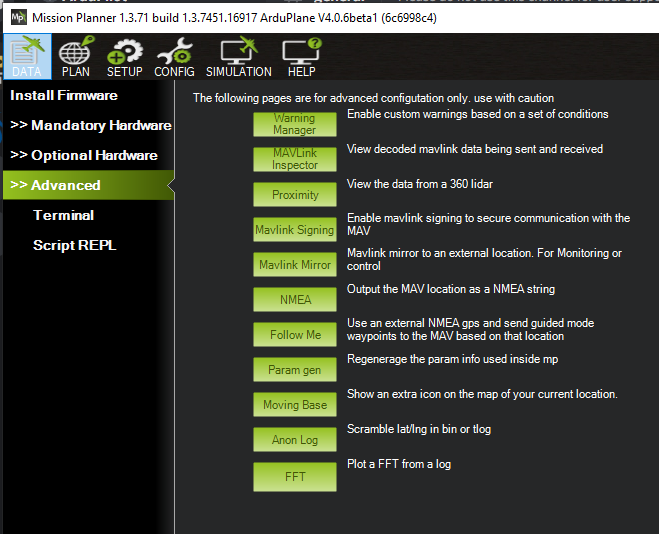
警告管理器(Warning Manager):基于状态项的值,你可以创建自定义警告消息,用于显示在HUD和数据屏幕的消息。
MAVLink检查器(MAVLink Inspector):实时监控接收到的各种MAVLink状态消息。
接近传感器(Proximity):如果配备了,从360激光雷达查看数据。
Mavlink签名(Mavlink Signing):允许您设置与飞行器的安全通信证书。
Mavlink镜像(Mavlink mirror):将Mavlink数据流转发到其它网络进行监控。另一种方法请参见MAVProxy Forwarding。
NMEA:通过网络或COM端口,以NMEA GPS编码的形式输出飞行器定位。
跟随我(Follow Me):如果在COM端口上使用附加的NEMA模式GPS来建立航点GPS定位,则可以将引导模式航点发送到车辆以跟随地面站。
参数生成(Param Gen):重新生成Mission Planner参数列表。如果新的固件参数不显示,则需要这个。
移动基地(Moving Base):如果将NMEA GPS连接到PC,在地图显示上显示PC移动的位置。
匿名日志(Anon Log):允许隐藏你的位置,可以在共享日志文件时隐藏你的位置。
快速傅里叶变换(FFT):从IMU批采样的日志中绘制FFT。